
Künstliche Intelligenz (KI)
KI-gestützte Optimierung im SDV: Daten → Modelle → Orchestrierung → Bench-Validierung.
KI-gestützte Optimierung im Software Defined Vehicle
Die Software Defined Vehicle Plattform integriert moderne KI-Verfahren, um Fahrzeuge, Netzwerke und Softwarefunktionen intelligent zu optimieren. Echtzeit-Messdaten, Bench-Topologien und Shadow-Mode-Ausführungen liefern die Grundlage für maschinelles Lernen und Graph-basierte Modelle.
KI wird damit zu einem zentralen Beschleuniger für Softwarequalität, Performance und Energieeffizienz im SDV.
KI-Pipeline: Vom Rohdatum zur validierten Freigabe
Die KI-Pipeline verarbeitet reale Messwerte in vier aufeinanderfolgenden Stufen – vom Rohdatum bis zur Hardware-validierten Freigabe:
01 – Realistische Messwerte aus Bench & Shadow Mode
Die SDVA-Testbench sammelt hochauflösende Daten auf Mikrosekunden-Ebene:
- Latenz & Jitter: Ende-zu-Ende-Messung pro Hop, Schwankungsanalyse der Übertragungszeit
- Bus-Last: Datendurchsatz pro Bus – Ethernet/TSN-Auslastung, CAN/CAN-FD Bus-Load, Error-Frames
- Hardware-Metriken: CPU/Memory-Auslastung, Temperaturprofile und Energieverbrauch pro Node
- Distributed Tracing: Wasm-Modul-Interaktion mit FPGA-basierten Timestamps – µs-präzise, versioniert
Von der Bench in die Pipeline
Hochauflösende Messwerte aus der SDVA-Testbench – Latenzen, Bus-Lasten, Temperaturprofile – fließen direkt in die KI-Trainingspipeline. Keine synthetischen Daten, keine Vereinfachungen.
„Was die Bench misst, lernt das Modell – physikalisch fundiert, nicht simuliert."
02 – Graph Neural Networks für SDV-Topologien
Die Bench exportiert Topologie-Graphen (ECUs = Knoten, Busverbindungen = Kanten) und messbasierte Latenzprofile, um Graph Neural Networks zu trainieren.
Die Modelle lernen:
- Latenzprognosen: Vorhersage von End-to-End-Latenzen für neue E/E-Architekturen
- Engpass-Erkennung: Identifikation kritischer Pfade, Bottlenecks und QoS-Probleme
- Software-Platzierung: Automatische Zuordnung von Modulen zu ECU, Core oder Beschleuniger
- Architektur-Evolution: Bewertung von Migrationspfaden – Domäne → Zone → Zentral
Graphen, die Fahrzeuge verstehen
Graph Neural Networks operieren direkt auf der E/E-Topologie des Fahrzeugs: ECUs als Knoten, Busverbindungen als Kanten, Latenzprofile als Gewichte. So entstehen Modelle, die Architekturen bewerten, bevor Hardware verbaut wird.
„Das Netzwerk versteht das Netzwerk – GNNs erkennen Muster, die manuell unsichtbar bleiben."
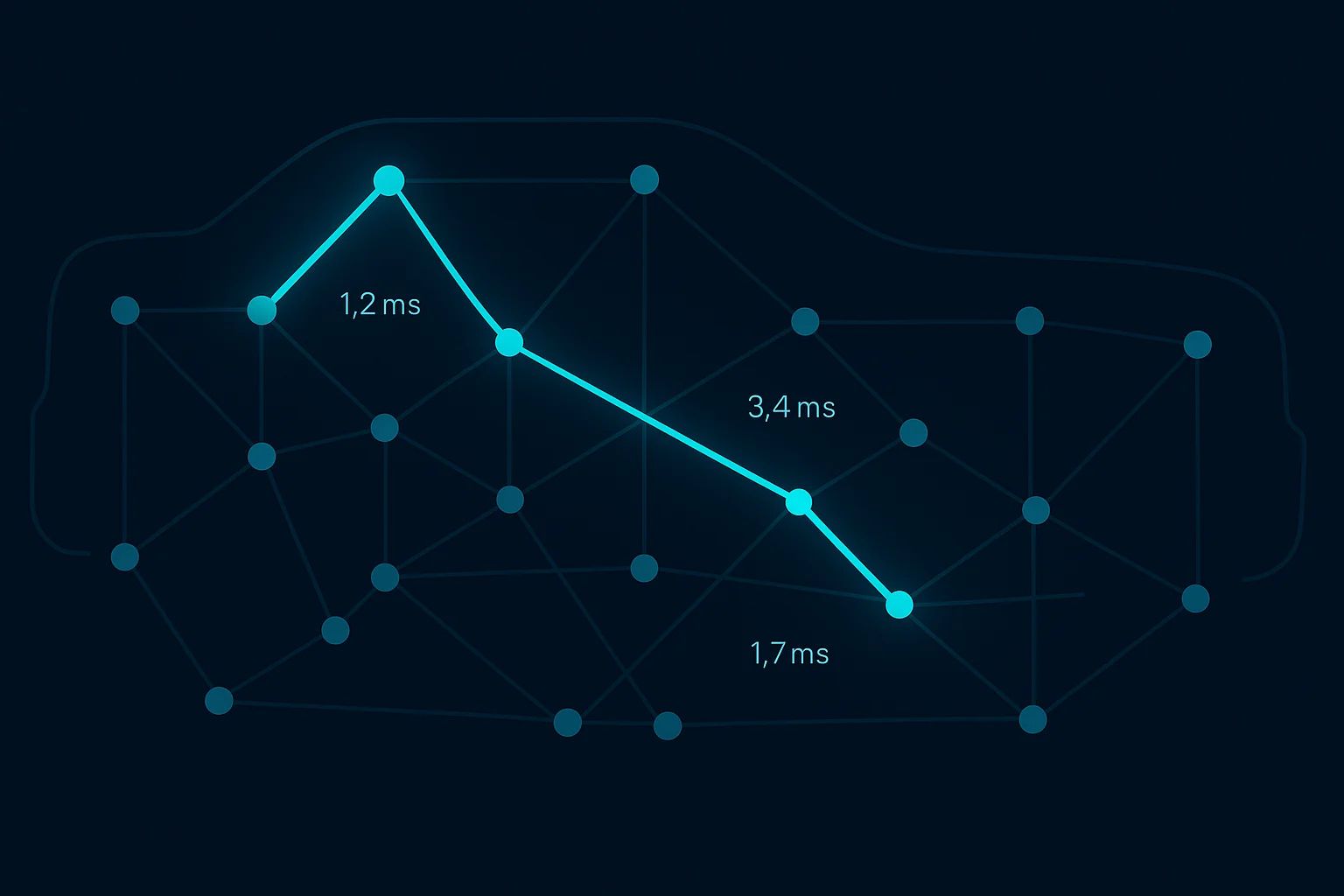
03 – KI-basierte Optimierung der Fahrzeugarchitektur
Die KI-Modelle liefern konkrete Optimierungsvorschläge, die in der SDV-Plattform umgesetzt werden:
- Netzwerkpfade & Routing: Minimierung von Latenz und Jitter bei gleichzeitiger Lastverteilung über parallele Pfade
- Software-Platzierung: Automatische Auswahl der optimalen Hardwareplattform – x86, ARM, RISC-V, GPU, FPGA – basierend auf Latenz- und Energieprofilen
- TSN-Profile: Optimierung von Prioritäten, VLAN-Settings und TAS-Scheduling für unterschiedliche Verkehrsklassen
- Failover-Strategien: Erkennung kritischer Knoten und proaktive Umschaltung auf redundante Pfade – bevor der Fehler eintritt
Intelligentes Routing in Echtzeit
KI-Modelle analysieren die Fahrzeugtopologie und identifizieren optimale Datenpfade unter Berücksichtigung von Latenz, Auslastung und Redundanz. Suboptimale Routen werden automatisch erkannt und durch bessere ersetzt.
„Die KI optimiert nicht blind – sie validiert jede Empfehlung auf der physischen Bench."
04 – Realistische Absicherung unter Hardwarebedingungen
Alle KI-Vorschläge durchlaufen eine vollständige Hardware-Validierung auf der SDVA-Testbench, bevor sie freigegeben werden:
- Physikalische Umschaltung: Topologie-Änderungen über die Schaltmatrix – reale Signalwege, nicht virtuell geroutet
- Ende-zu-Ende-Latenz: Messung der tatsächlichen Verzögerung unter realen Bedingungen
- Shadow-Mode-Vergleich: KI-Vorschläge laufen parallel zur produktiven Logik – risikofreie Absicherung
- FPGA-Timestamps: Hardware-basierte Zeitmessung eliminiert Software-Overhead – µs-Präzision
Warum KI im SDV unverzichtbar wird
- Datengetrieben statt statisch: Moderne E/E-Topologien mit hunderten Knoten und tausenden Parametern sind zu komplex für manuelle Optimierung – KI erkennt Muster, die Menschen übersehen
- Schnellere Entwicklung: Reproduzierbare Bench-Tests und Shadow-Mode-Validierung beschleunigen den Weg vom Prototyp zur Serienreife
- Performance & Effizienz: Smart Routing, intelligente Software-Platzierung und automatische Hardwareauswahl reduzieren Latenz und Energieverbrauch
- Voraussetzung für OTA: Dynamische Homologation erfordert automatisierte Risikobewertung, Abhängigkeitsanalyse und Performance-Prognose – genau das liefert die KI-Pipeline
Kurz gesagt
KI macht das SDV schneller, sicherer und effizienter – von der Topologie bis zur Funktionslogik. Die Plattform verbindet:
- Realwelt-Daten: Hochauflösende Bench-Messwerte statt synthetischer Simulationen
- Lernende Modelle: GNNs, die Latenzen prognostizieren und Architekturen bewerten
- Automatisierte Entscheidungen: Routing, Platzierung und TSN-Konfiguration durch KI
- Hardware-Validierung: Jeder KI-Vorschlag wird physisch auf der Bench abgesichert
So entsteht eine intelligente SDV-Plattform, die sich kontinuierlich verbessert.
Weitere Technologie-Seiten: SDV-Plattform · WebAssembly · Testplattform