
WebAssembly
Platform-independent software for the Software-Defined Vehicle – components, interfaces, runtimes and quality assurance.
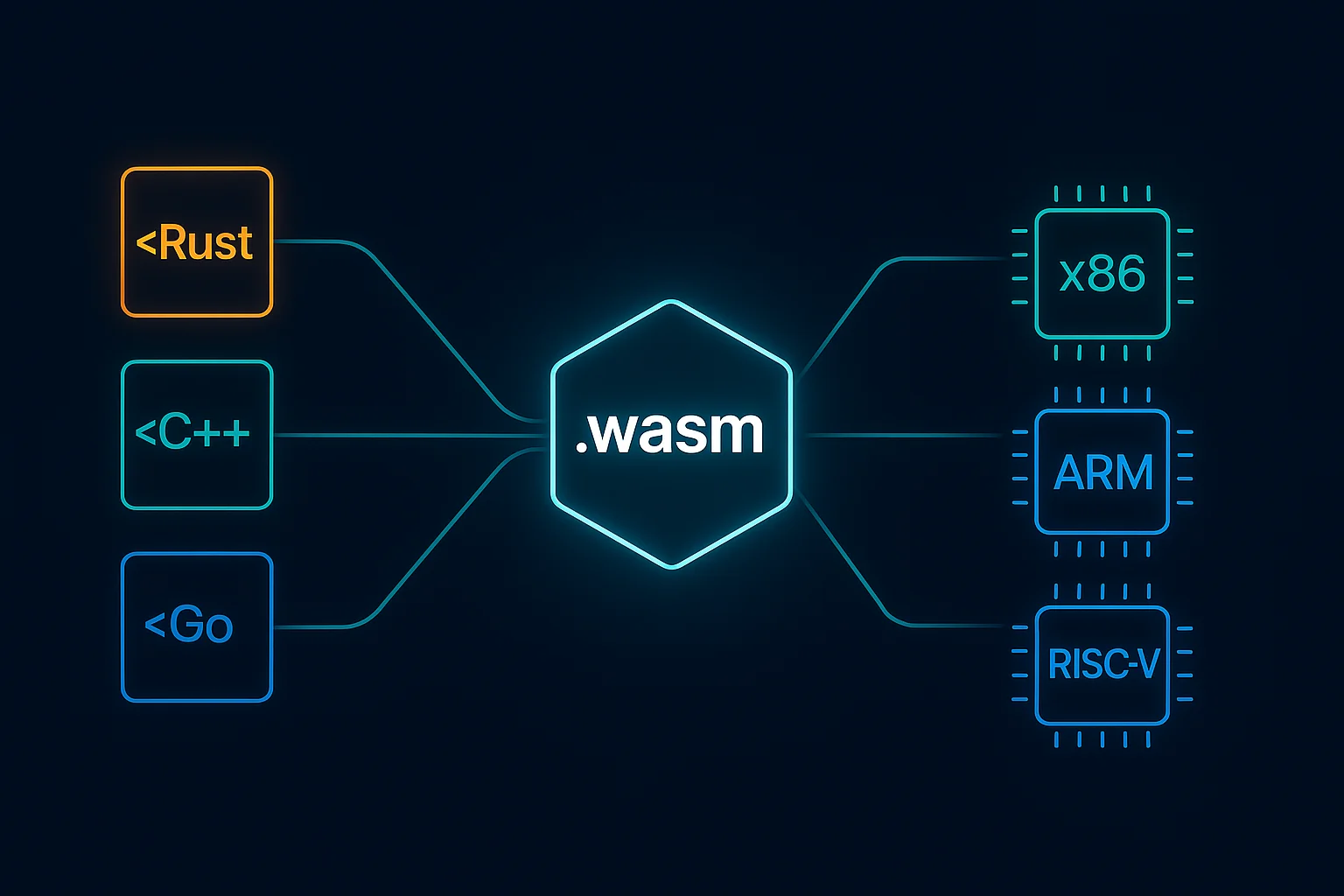
WebAssembly was developed to run complex programs portably and securely – originally in the browser, today on servers, embedded systems, and in the vehicle. Key for OSxCAR: a single compiled binary runs unchanged on x86, ARM, and RISC-V – from simulation to the target ECU.
One Binary – All Architectures
Source code in Rust, C++, or Go is compiled once into a Wasm binary. That binary runs unchanged on any target system – regardless of processor architecture or operating system. No re-compile, no platform-specific glue code.
"Compiled once, runs everywhere – from simulation to in-vehicle deployment."
Evolution Stages
From browser runtime through the first server standards to the modular vehicle interface – WebAssembly evolved into a universal execution environment over ten years.
- 2015
- Browser Support (Emscripten)
All major browsers support WebAssembly – this platform is often named after its compiler "Emscripten." All interactions with the world outside the WebAssembly sandbox take place via JavaScript functions called from WebAssembly.
- 2017
- Specification 1.0
The first official WebAssembly specification lays the foundation for a portable, secure binary format – adopted by the W3C as an open standard.
- 2019
- WASI Preview 1 (wasip1)
WebAssembly abstracts the processor – but a running system also requires an operating system. WASI standardizes the interface between program and OS, e.g. to query the current time or read files. This allows WebAssembly to run on servers for the first time. However, wasip1 is not modular and strongly oriented towards POSIX – less suitable for smaller microcontrollers and only extensible with considerable effort.
- 2022
- Specification 2.0
Additional instructions: vector and fast memory fill instructions (SIMD, Bulk Memory) as well as multiple return values for program sections – significant performance boost for compute-intensive applications.
- 2024
- WASI 0.2 – Component Model
Standardizes the interface description language WIT, enabling the definition of additional interfaces. Complex data types can be exchanged between programming languages. The modular design significantly simplifies porting to microcontrollers – the foundation for automotive use.
- 2025
- Specification 3.0
64-bit support, multiple memory regions, support for objects outside linear memory (Garbage Collection), efficient calls at the end of a function (Tail Calls), and exception handling.
- 2026
- WASI 0.3 – Async & Streams
Enables data streams, asynchronous calls, and results. This is particularly useful for modeling AUTOSAR interfaces more easily – an important step for integration into existing automotive stacks.
OSxCAR Extensions
Within OSxCAR, extensions were developed that enable the combination of WIT interfaces with system-specific optimizations:
- WIT + Hardware Optimization: Combining type-safe interfaces with platform-specific accelerators – without sacrificing portability or security boundaries
- Zero-Copy Camera Pipeline: Extension for camera-based driver assistance systems – eliminates memory copies on the path from camera to ADAS module, reducing latency and overhead directly
More Technology Pages: SDV Platform · Artificial Intelligence · Test Platform